新纪录| ETH四足机器人4秒爬上1.8米梯子!创新钩爪设计,梯子攀爬更稳定!
四足机器人在工业领域的应用日益广泛,它们可以搭载传感器套件,作为独立的检查平台。尽管足式机器人在复杂环境中表现优于轮式机器人,但在应对工业环境中最普遍的垂直挑战——梯子时,它仍然难以稳定导航。

近日,瑞士苏黎世联邦理工学院(ETH Zurich)机器人与智能系统研究所的工程师们对ANYbotics公司开发的ANYMal四足机器人进行了改造,使其不仅能够攀爬不同倾角的梯子,还展现出了相对较快的攀爬速度和良好的稳定性。这一改造显著提升了机器人在复杂环境中的移动能力,使其在执行检查、救援等任务时更加灵活多变。
视频中可以看到Anymal换上了特制的足底结构,十分灵活地攀爬梯子,登上一个高台,动作相当丝滑没有卡顿。

为了增强ANYMal的爬梯能力,工程师们专门设计了 钩状末端执行器,并采用 强化学习与模拟训练相结合的方式,通过独特的“教师-学生策略”(teacher-student paradigm)模式,让ANYMal掌握爬梯技巧。
巧妙设计的钩爪让攀爬成为可能
早在几年前,ETH Zurich机器人实验室就尝试了【足式机器人+轮子】的搭配,大大提高了机器人在普通路面的移动效率。
但要让四足机器人攀爬梯子,首先要解决的就是 抓握问题。传统的四足机器人通常采用球形或平面状的脚掌设计,这种设计虽然适合在普通地形行走,但无法在梯子上产生足够的锚定力。
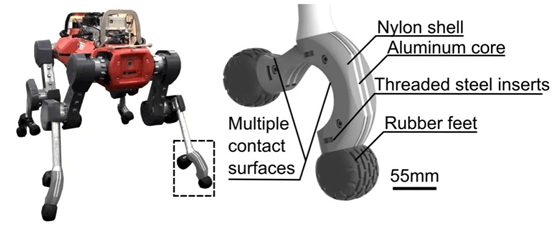
研究团队巧妙地设计了一种 钩状末端执行器,替代了常规的脚掌。这个钩爪由铝制核心和3D打印外壳组成,内部有一个凹面结构,可以稳定地卡在圆形横档上。同时,钩爪还有突出部分,可以推拉横档,产生向上攀爬所需的力。
这种设计在仿真环境中被进行了严格的测试。工程师们使用 RaiSim物理引擎构建了高度逼真的仿真环境,并利用 软接触模型与各向异性摩擦模型来提高了仿真的真实性。
强化学习:让机器人学会灵活攀爬
研究团队采用了强化学习的方法,并设计了一种 “教师-学生策略”的训练模式。
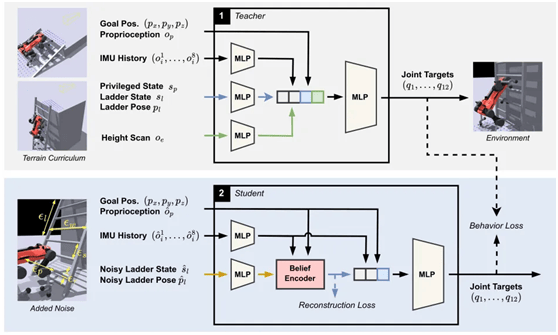
具体来说,他们首先在仿真环境中训练了一个 “教师策略”。这个教师可以获得完美的环境信息,包括机器人自身状态、周围地形高度等。通过反复尝试,教师逐渐掌握了攀爬技巧。
接下来,研究人员训练了一个 “学生策略”。学生只能获得有噪声的传感器数据,更接近现实情况。学生通过模仿教师的动作,同时学习如何从有限的信息中推断出真实环境状态。
这种“教师-学生策略”的训练模式非常巧妙。它让机器人能够在理想环境中快速学习复杂技能,同时又具备应对现实世界不确定性的能力。
最后,工程师们将仿真中训练的策略 零样本迁移到ANYmal上,实现了 多层安全机制,包括软件限位、紧急停止逻辑等,确保实验过程中机器人和环境的安全。
实验结果显示,在70°至90°的梯子倾角下,ANYMal的整体成功率达到90%。具体来讲,在70°和80°倾角的梯子上,机器人实现了100%的成功率;在90°的完全垂直梯子上,取得了67%的成功率。在1.8米长的梯子上,它仅用了4秒就完成了攀爬。这比之前报道的四足机器人攀爬速度快了232倍!
工程师们表示,未来的研究将结合视觉感知使四足机器人能够上下梯子;现有的钩爪设计并非最优,将进一步提升钩爪的设计与机器人控制系统的协同工作能力,从而在各种活动中实现更佳性能。
论文地址:https://arxiv.org/abs/2409.17731
完整视频地址:
https://sites.google.com/leggedrobotics.com/climbingladders
END
●看点:机器人概念上市公司2024上半年业绩普遍承压,机器人与AI打通迎机遇
●55家机器人上市公司2023年报看点:喜忧参半,洗牌加剧
●具身智能机器人发展大会“亮点”剧透:主题先行、规格高、路演绝佳场
●具身智能机器人浪潮袭来,又一场行业盛会待启航
●对话清华大学赵明国:加速进化复现波士顿动力动作,我们需要的是信心和创新!
●2023年国家科技奖初评结果公布!9所985光头!西交华科前三!(附全名单)
●史无前例!美国工程师与ChatGPT4合作设计人工智能芯片
●俄罗斯总统普京批准新版《2030年人工智能发展国家战略》
●人口不足20万!丹麦小镇欧登塞如何成为全球机器人中心?
●“商业化元年”开启,人形机器人再添实力新玩家
●瑞士研究人员开发出新型人造肌肉,更轻巧、更安全、更坚固!
●欧盟终止亚马逊并购iRobot,昔日扫地机器人巨头何去何从
●2023年机器人行业十大新闻
●肌肉组织驱动的双足机器人问世,生物混合机器人突破性进展!
●专业人士浅谈机器人即服务模式——自动化的未来
●一文说透中国人形机器人研发团队
●人形机器人炙热之下,突进与阻力的较量
●谁是最靓的仔?53家机器人上市公司2023中报看点
●53家机器人上市企业财报半年报下载(附PDF)
●院士报告|潘云鹤:人工智能的行为智能和产品智能
●院士谈推动机器人协同智能制造的新动能
●院士谈机器人创新设计的六大关键技术
●西木科技拓宽人形机器人研究新角度
●院士谈未来人工智能发展的双驱动模型
●院士谈机构智能让“变形金刚”从屏幕走进现实
联系我们
·微 信 号 :myrobot2001