ETHZ&谷歌&斯坦福NeurIPS 2025新研究:从几张图片恢复建筑的三维CAD结构,代码和数据将开源
- 论文标题: HouseLayout3D: A Benchmark and Training-Free Baseline for 3D Layout Estimation in the Wild
- 作者: Valentin Bieri, Marie-Julie Rakotosaona, Keisuke Tateno, Francis Engelmann, Leonidas Guibas
- 机构: 苏黎世联邦理工学院、谷歌、斯坦福大学
- 会议: NeurIPS 2025 (Datasets and Benchmarks Track)
- 论文地址: https://arxiv.org/abs/2512.02450
- 项目主页: https://houselayout3d.github.io
- 代码仓库: https://github.com/houselayout3d/houselayout3d
大家好!今天想和大家聊一篇非常有趣的工作,来自谷歌、苏黎世联邦理工学院和斯坦福大学的研究者们,它发表在今年的NeurIPS数据集与基准测试方向上。这项研究直击当前建筑3D布局估计领域的一个核心痛点:现有模型大多在简单的单层或单房间合成数据上训练,一遇到真实世界里复杂的多层建筑就“水土不服”。
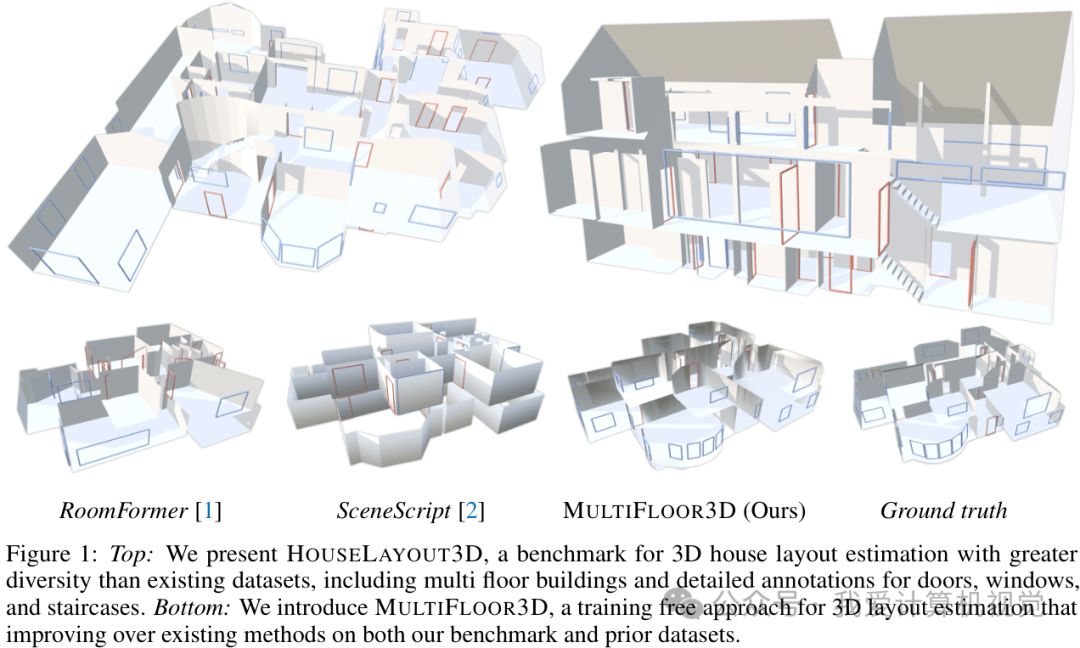
为了解决这个问题,他们做了两大工作:第一,发布了一个名为HouseLayout3D的全新基准数据集,专门针对真实世界的大型多层建筑。第二,提出了一个叫MultiFloor3D的无训练基线方法,效果惊人地好,甚至在多个指标上超越了现有的需要大量训练的深度学习模型。
研究背景:从单间到整栋楼的跨越
3D布局估计,通俗讲就是让计算机看懂一个空间的结构,比如墙壁、地板、天花板、门窗在哪里,把这些信息抽象成几何多边形。这对于机器人导航、增强现实、室内设计等应用至关重要。
目前的主流方法,比如RoomFormer和SceneScript,通常依赖于在合成数据集(如Structured3D)上进行监督学习。这些数据集虽然规模大,但场景相对简单,大多是单个房间或者小公寓。这就导致了一个问题:当模型面对真实世界里有楼梯、有多个楼层的大房子时,它们就很难处理了。
现有的一个“曲线救国”的办法是,先把一个大建筑手动或自动切分成一个个独立的楼层,单独处理完再拼起来。但这样做会丢失全局的空间上下文信息。比如,楼梯是连接不同楼层的关键结构,如果把楼层分开了,模型就很难理解楼梯的作用,也无法构建一个完整的、连贯的建筑结构。
正是为了填补这一空白,研究者们构建了HouseLayout3D数据集,希望推动3D布局估计技术从“单间”思维真正走向“整栋楼”的全局理解。
HouseLayout3D:首个真实多层建筑布局基准
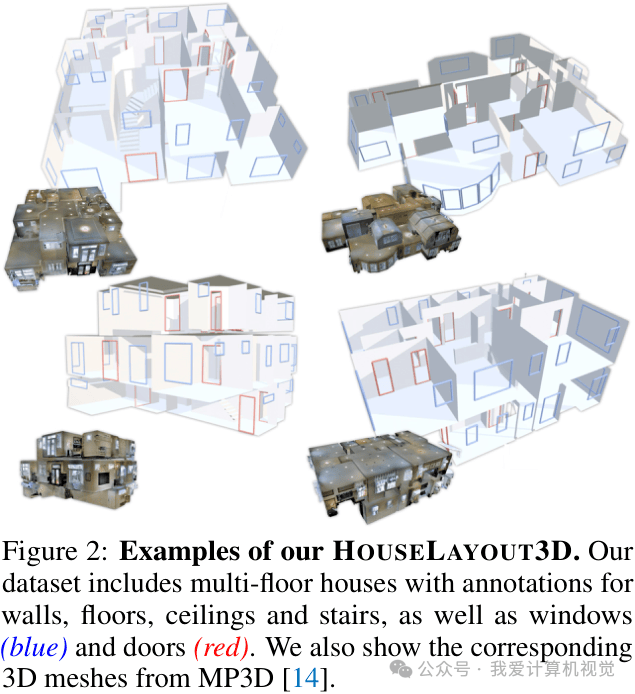
HouseLayout3D是第一个专为大型、多层建筑3D布局估计设计的真实世界基准。它基于著名的Matterport3D (MP3D)数据集,通过手工标注的方式为真实的3D扫描模型创建了高质量的CAD级别布局注释。
HouseLayout3D数据集的规模和细节都相当可观:
- 建筑数量:包含 16 栋建筑
- 独立楼层:共 33 个独立楼层
- 房间数量:共 317 个房间
- RGB-D帧数:超过 26,000 帧
- 注释元素:292 扇门、379 扇窗户、34 段楼梯
- 建筑层数:每栋建筑包含 1 到 5 层,每个建筑有 4 到 40 个房间。
特色非常鲜明:
- 真实世界与大规模: 所有数据都源于真实的3D扫描,而不是人工合成。
- 多楼层结构: 包含了复杂的跨楼层建筑,以及连接它们的楼梯。
- 精细化标注: 不仅有墙体、地板、天花板,还精确标注了门、窗和楼梯的位置和几何形状。
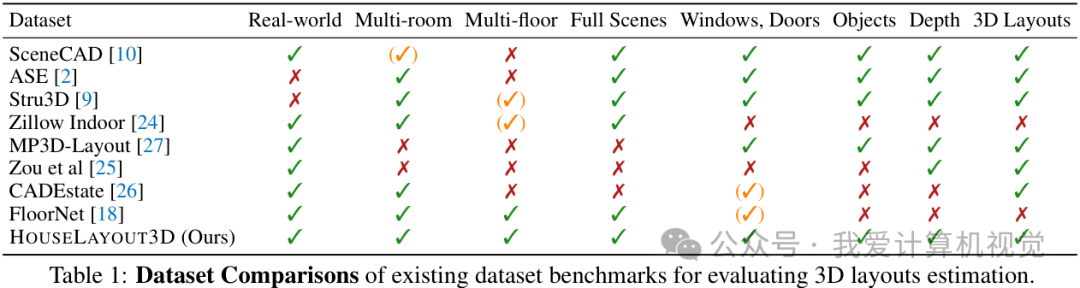
如下表所示,HouseLayout3D在多项关键特性上都填补了现有数据集的空白。
MultiFloor3D:无需训练的强大基线方法
有了新的“考场”,还需要新的“考生”。研究者们提出的MultiFloor3D就是一个非常特别的考生——它不需要任何训练。这个方法巧妙地整合了近年来场景理解领域的一些成熟技术,通过一个四阶段的流程来生成3D布局。
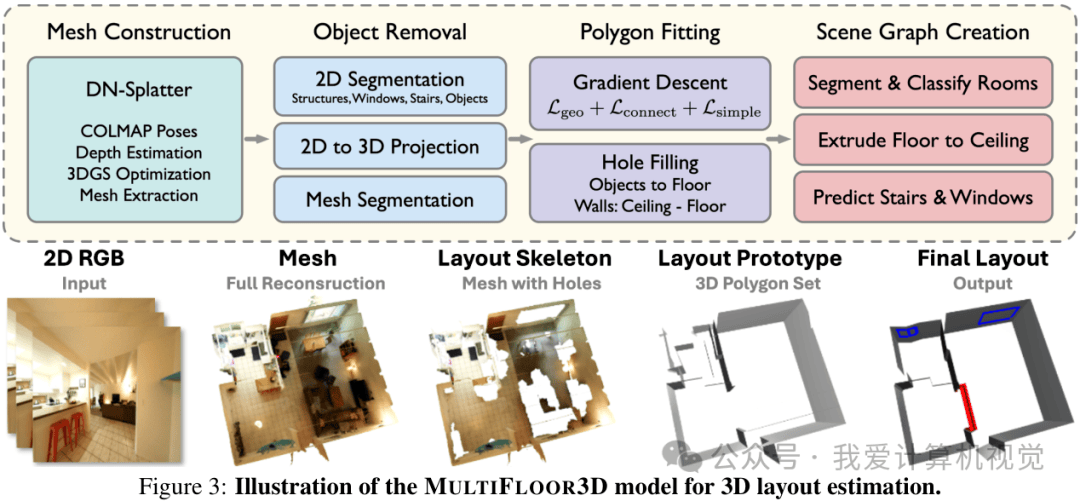
整个流程的输入仅仅是场景的一组RGB图像,输出则是一个由多边形表示的、带有语义标签(墙、地板、门等)的3D布局。
1. 从图像到网格:三维重建
第一步,利用现成的技术(如DN-Splatter)从多张2D图像重建出场景的密集三维网格(Mesh)和深度图。这是后续所有处理的基础。
2. 提取骨架:识别核心结构
第二步,从重建的网格中提取出布局的“骨架”。这里,研究者们首先使用一个强大的图像分割模型(OneFormer)对输入图像进行语义分割,识别出墙壁、天花板、地板等“结构性组件”,以及家具、窗户、楼梯等其他元素。然后,通过将2D分割结果反投影到3D网格上,为网格的每个部分赋予语义标签。最后,筛选出墙、地、顶等主要结构,形成布局骨架。
3. 优化原型:填补缺失与修正瑕疵
从三维扫描数据中直接提取的骨架往往是不完美的,比如存在因为家具遮挡造成的空洞,或者窗户区域的几何信息缺失。
第三步是整个方法的核心,即通过一个优化过程,将不完美的“骨架”变成一个完整、连续的“布局原型”。研究者们将骨架初始化为一组3D多边形 ,然后通过梯度下降来优化这些多边形的顶点位置和所在的平面方程。优化的目标函数主要由三部分构成:
- : 几何保真项,确保优化后的布局能准确地重建原始场景的几何形状,并且不会侵占已观测到的“空旷空间”。
- : 连通性项,鼓励不同多边形之间紧密连接,消除微小的缝隙,形成连续的表面。
- : 简洁性项,鼓励多边形共享边界,从而简化模型,去除冗余的边界。
最终的损失函数是这三项的加权和:。
具体的损失函数定义如下:
几何损失 由两部分组成:
- 代理损失 :惩罚布局骨架的顶点到最近多边形表面的距离,确保原型贴近原始观测。
- 空旷空间损失 :惩罚多边形与相机视线(代表已观测的空旷区域)的交叉。
连通性损失 惩罚每个多边形的顶点到其他多边形表面的距离,促进面与面之间的无缝连接。
简洁性损失 惩罚那些不被共享的边的长度,促使模型用更少的顶点和共享边来表示场景。
通过这个精巧的优化过程,模型能够智能地“脑补”出被遮挡的墙面和地面,修正几何错误,得到一个高质量的布局原型。
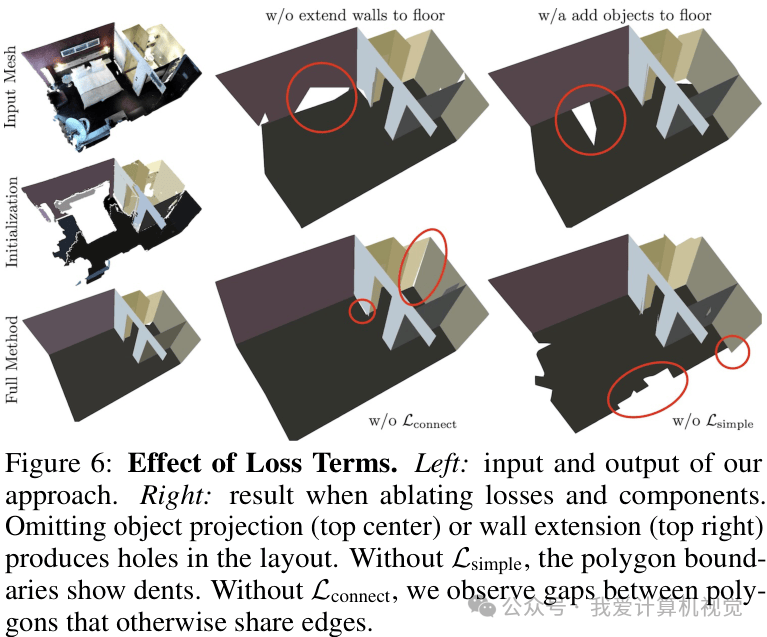
上图直观地展示了不同损失项的作用。例如,缺少 会导致多边形之间出现缝隙;缺少 则会使边界变得“犬牙交错”。
4. 生成场景图:从几何到语义
最后一步,将优化好的布局原型解析成一个结构化的场景图(Scene Graph)。这个图的节点代表房间,边代表人与人之间的连接(如门、楼梯)。
这个过程也很有意思:
- 楼层识别: 根据布局原型中被标记为“地板”的多边形,聚类出不同的楼层。
- 房间分割: 对每个楼层,结合地板和天花板信息生成2D平面图,再利用现有的房间分割算法(如Hov-SG)将其切分成不同的房间。
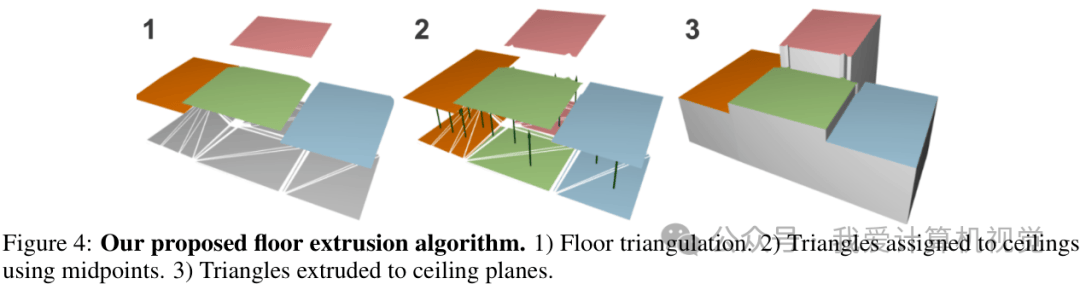
- 回到3D: 最后,通过一个巧妙的“房间拉伸”算法,将每个房间的2D平面图拉伸回3D,形成一个封闭的房间壳体。这个算法会智能地将2D地板的每个三角面片拉伸到对应的天花板平面上。
通过这四步,MultiFloor3D就能够从一堆无序的图片中,重建出整个建筑的结构化3D布局。
实验结果:零训练吊打全场?
研究团队在HouseLayout3D和ScanNet++数据集上对MultiFloor3D进行了广泛的实验评估,并与RoomFormer和SceneScript等SOTA方法进行了比较。
HouseLayout3D数据集上的表现
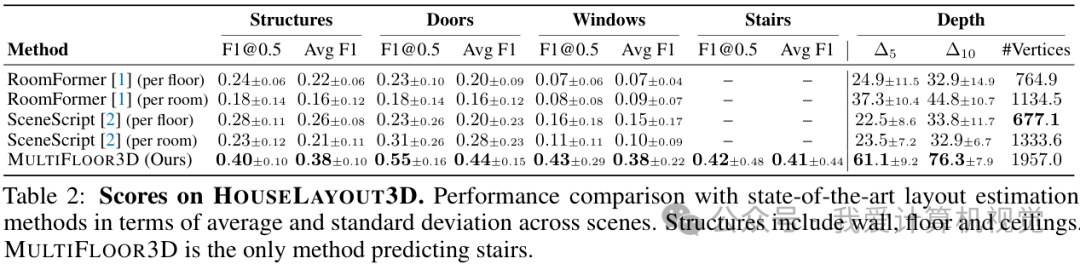
上表展示了在HouseLayout3D数据集上的F1分数和深度指标结果。尽管基线模型(RoomFormer和SceneScript)是针对单层或单房间设计的,并且通常在大型合成数据集上训练,但MultiFloor3D作为无需训练的方法,在所有评估指标上都显著优于现有SOTA方法。尤其值得注意的是,MultiFloor3D是唯一能够准确预测楼梯结构的方法,这凸显了其在处理多楼层复杂结构上的独特优势。
ScanNet++数据集上的表现
在ScanNet++数据集上,由于缺乏布局注释,研究团队使用深度精度作为布局估计误差的近似指标。
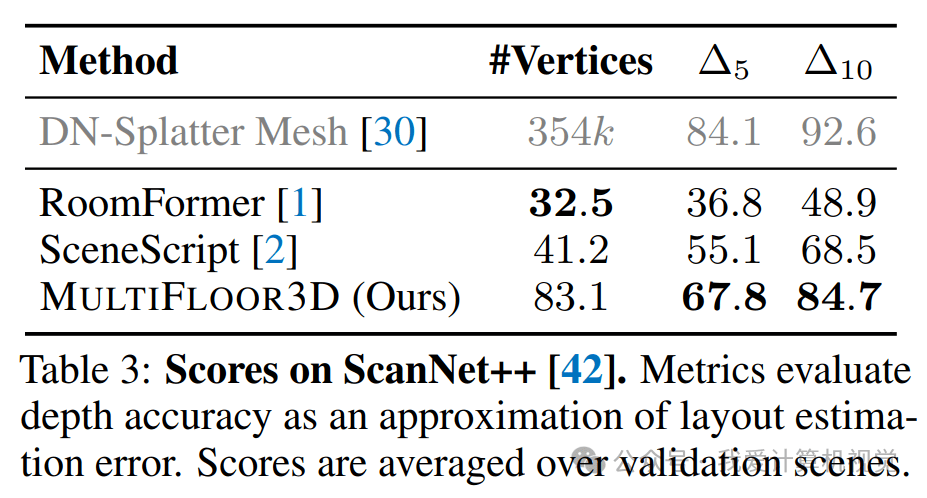
从上表可以看出,MultiFloor3D在ScanNet++数据集上同样超越了基线方法,尤其是在和深度精度指标上达到了67.8和84.7。这表明即便是在没有显式布局标注的数据集上,MultiFloor3D也能提供更准确的几何表示。
潜在应用:与大语言模型结合实现导航
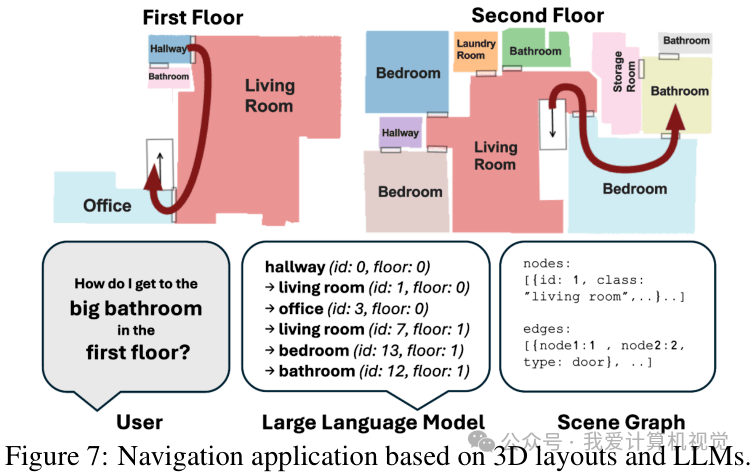
论文还展示了全建筑3D布局的一个潜在应用:结合大语言模型 (LLM) 实现导航。如上图所示,通过将3D场景图(包含房间、门、楼梯等连接信息)以JSON格式输入给LLM,并提出导航指令,LLM可以生成逐向的导航指引。这为未来的智能导航、机器人路径规划等应用打开了新的可能性。
总结与思考
HouseLayout3D和MultiFloor3D的发布,无疑是3D布局估计领域的一个重要里程碑。它不仅提供了一个更贴近真实世界复杂性的数据集,弥补了现有数据集的不足,更通过一个无需训练且性能优异的基线,展示了解决多层建筑布局估计问题的巨大潜力。
可能这一方向比较小众,但对于关心这一领域的研究者来说,这应该是一个不容忽视的进展。